Drivers driving A and B cars will encounter such problems. When driving on a winding road or a small street in the countryside at night, they always feel that the headlights are in the same direction as the road you are driving. There is a big problem with driving speed and driving safety. The car auxiliary lighting follow-up system is based on the single chip AT892051 chip as the control core, and the stepping motor is controlled to drive the auxiliary illumination light source to rotate with the rotation of the steering wheel. It plays an auxiliary role in the headlight illumination of the car. The auxiliary lighting source adopts high-brightness LED lamp. This kind of light source has energy saving, good seismic performance and light weight. It conforms to the "auxiliary" feature and can be installed or removed at any time. Simply attach the permanent magnet at the bottom of the light source to the top of the cab or to any part of the car. The Hall switch is used to detect the steering and corner of the car and the speed of the turn. The detection signal and the reverse signal are sent to the input interface of the single-chip microcomputer. After the analysis, calculation and judgment by the single-chip microcomputer, the output signal is output from the output interface of the single-chip microcomputer. The rotation of the stepping motor and the auxiliary light source realizes follow-up control.
This article refers to the address: http://
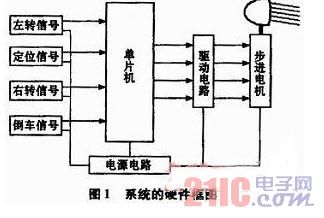
1 The basic components of the system hardware and the role of each part
The hardware block diagram of the system is shown in Figure 1. The hardware system consists of single chip AT89C2051 chip, 4806-A stepper motor, stepper motor drive circuit, HAM8X20PNP Hall switch, 7805 three-terminal regulator, crystal resonator and so on.
1.1 single chip
Comprehensive analysis of the control requirements of the automotive auxiliary lighting follow-up system, the selection of AT89C2051 chip circuit is simple, economical, and can fully meet the requirements. The AT89C2051 is a low voltage, high performance CMOS 8-bit controller with 2K bytes of Flash Programmable Erasable Read Only Memory (PEROM). The device is fabricated using ATMEL's high-density, non-volatile memory manufacturing technology and is compatible with the industry-standard MCS-51TM instruction set and output pins. ATMEL's AT89C2051 is a highly efficient microcontroller due to the combination of a versatile 8-bit CPU and flash memory in a single chip. In addition, it is 20 pins, 15 programmable I / O lines, 128 × 8 internal RAM, operating voltage 2.7V ~ 6V.
Set the AT89C2051 chip (P3.0, P3.1, P3.2, P3.3) as the input port, use it to collect the left turn signal, positioning signal, right turn signal and reverse signal of the system, and send it to the CPU. Analyze, compare, judge, and send the judgment result to the output port. P1.2, P1.3, P1.4, P1.5 are set as output ports, and P1. 2~P1.5 are driven by the driver to control the stepping motor to realize follow-up control.
1.2 Hall switch
The Hall switch is the main component of the system's sampling, and the car's steering signal is collected by it. The advantage of using a Hall switch as a sensing element is that no changes are made to the original circuit of the car. Hall switch adopts HAM8X20PNP normally open type, which has the characteristics of small size, easy installation and wide voltage range, suitable for automotive 12V power supply. The output level of the HAM8X20PNP Hall switch is easily connected directly to the microcontroller.
1.3 stepper motor drive circuit
The drive circuit adopts discrete component circuit, which consists of a triode and peripheral circuits. The single-chip microcomputer outputs P1.2, P1.3, P1.4, P1.5, and then drives the stepper motor through the triode power amplifier circuit, P1.2, P1.3. P1.4 and P1.5 are set to be active low, and the triode is 9012PNP type. The design circuit is simple and the heat dissipation performance is good.
1.4 stepper motor
The stepper motor is the actuator of the follower system, and the 4806-A type is used. The motor has 4 phases (A, B, C, and D phases, respectively), a winding of 34 Ω, and a pulse amplitude of 12V.
1.5 constant current triode and LED lights
The constant current transistor is a second-generation semiconductor constant current device. Its biggest feature is that the constant current of the output can be adjusted by using the adjustment terminal and external components, which is most suitable for the design of the LED lamp. The LED uses a 0.5W high brightness white light diode.
1.6 power circuit
The power supply uses a car battery +12 V power supply and is directly supplied to the Hall switch and the stepper motor drive circuit. In addition, the +12V power supply is regulated by the three-terminal regulator 7805, which becomes +5V for the microcontroller control circuit.
1.7 clock circuit
The clock circuit consists of a 6 MHz crystal oscillator and peripheral circuitry that produces a 6 MHz clock signal for the system.
1.8 reset circuit
The reset circuit is composed of a resistor-resistance circuit around the pin of the single-chip microcomputer. When the microcontroller control circuit is powered on, a positive pulse is generated at the RST terminal to start the single-chip operation.
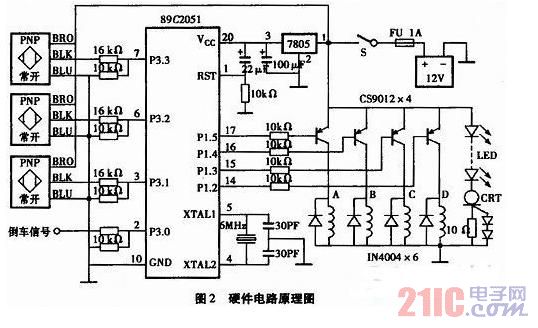
The hardware circuit schematic is shown in Figure 2:
2 software flow chart
The software flow chart is shown in Figure 3. According to the system function requirements, when the switch S is closed, the system starts, and the single-chip microcomputer detects the left, middle and right three Hall switches, and the auxiliary illumination source is turned on, and the light is bright. When the direction is left, the MCU controls the stepper motor to turn left. When the direction is turned to the right, the MCU controls the stepper motor to turn right. When the direction is positive, the MCU controls the stepper motor to go to the middle position.
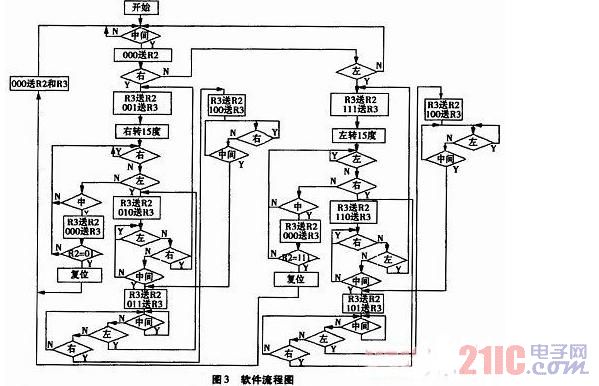
But in fact, there may be three situations when the direction is left-turned: one is to turn left half a turn and one left turn signal is detected; the other is to turn left one turn, and measure a left turn signal, a right turn signal and an intermediate signal; It is a left turn and a half turn, measuring a left turn signal, a right turn signal, an intermediate signal and a left turn signal. Any of these three conditions causes the stepper motor to turn left 30 degrees. In the same way, there are three cases when turning right: one is to turn right half a turn, and one right turn signal is detected; the other is to turn right one turn, and measure a right turn signal, a left turn signal and an intermediate signal; One turn and a half, a right turn signal, a left turn signal, an intermediate signal and a right turn signal are detected. Either of these three conditions is to turn the stepper motor to the right by 30 degrees. Therefore, we control the left and right turn of the stepper motor and can not directly control the left and right turn of the stepper motor according to the detected left and right state signals, but the analysis and judgment according to the above six conditions, complete the stepper motor The left and right rotation controls are used to solve the problem of lighting in the left and right directions of rotation during night driving.
3 Conclusion
The above is the design of the hardware part, interface assignment and software flow of the car auxiliary lighting follower system. In the future, it is necessary to design the shape of the LED luminaire from the aerodynamic point of view, design the rotating part of the auxiliary lighting system from the perspective of waterproof sealing, adjust and optimize the control program, and strive to be simple, applicable, reliable and economical. .
60V 60Ah Power Battery,Energy Storage Battery,Electric Scooter Motorcycles,Custom Lithium Battery Pack
Sichuan Liwang New Energy Technology Co. , https://www.liwangnewenergy.com