CES2017 is being held in Las Vegas, USA, and autonomous driving technology has undoubtedly become the focus of the major car and technology giants. How much do you know about autopilot? This article will explain the significance of different hierarchical autopilot technologies.
Automated driving systems need to be graded. From the details, the United States has formed a unified, based on SAE InternaTIonal's definition of automation level, as follows:
L0: The driver is completely in control of the vehicle;
L1: The automatic system can sometimes assist the driver in completing certain driving tasks;
L2: The automatic system can perform certain driving tasks, but the driver needs to monitor the driving environment and complete the rest, while ensuring problems and taking over at any time. At this level, the error perception and judgment of the automatic system is corrected by the driver at any time, and most car companies can provide this system. L2 can be divided into different usage scenarios by speed and environment, such as low-speed traffic jam in the loop, fast driving on the highway and automatic parking of the driver in the car;
L3: The automatic system can perform certain driving tasks as well as monitor the driving environment under certain circumstances, but the driver must be prepared to regain control of the driving (when the automatic system makes a request). So at this level, the driver is still unable to sleep or take a deep rest. After the completion of L2, the research field of car companies is extended from here. Due to the particularity of L3, it is currently seen that the more meaningful deployment is to upgrade on high-speed L2;
L4: The automatic system can complete the driving task and monitor the driving environment under certain circumstances and specific conditions. The deployment of L4 is mostly based on the use of the city. It can be fully automatic valet parking or direct Combined with a taxi service. At this stage, within the scope of automatic driving, all the tasks related to driving and the driver are all right, and the sense of external responsibility is all in the automatic driving system. There are different design and deployment ideas here;
L5: All driving tasks that the automated system can perform under all conditions.
The automatic driving system we refer to is usually in the 3 to 5 level. As the level is improved, the requirements for the system are also increased. Due to the current classification of autonomous driving, especially L3 and L4 are still not widely used in real life, we have some cognitive controversy about this demand.
Classification method: distinguish between DDT, DDT task support and design operation scope;
Dynamic Driving Task (DDT): refers to the actions and decision-making behaviors required to drive a vehicle on a road;
Vehicle execution: including lateral movement of the vehicle through the steering wheel, control of the vehicle by acceleration and deceleration;
Perception and Judgment (OEDR): Operation of the longitudinal direction of the vehicle, detection of objects and events, cognitive categorization and subsequent response, monitoring of the surrounding environment of the vehicle and implementation of corresponding operations, plans for vehicle movement, and external information. transfer.
DDT Fallback: Autopilot is designed to take into account system failures (failures that cause the system to fail) or occur beyond the original operating design of the system. At the time, it is necessary to give a solution path to minimize the risk.
The Design Operating Range (ODD) is a set of parameters that measure the weather conditions, road conditions (straight, curved radius), vehicle speed, traffic flow, etc. we know to ensure that the system's capabilities are within a safe environment.
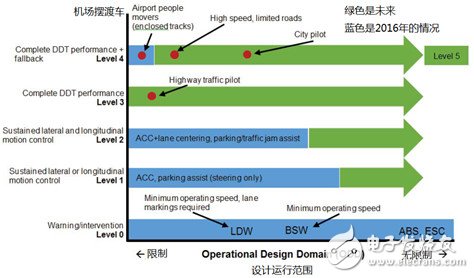
Figure 1 Comparison of the scope of design
L2 combination drivingThe driver and the car share control, and the system has both vertical and lateral automatic control, and has more than two. Throughout the opening process, the driver may not operate the steering wheel, throttle and brakes (abandoning the main control), but need to observe the surrounding conditions and provide safe operation.
The driver must be on standby and can be connected at any time in case of system exit and system error.
Autopilot system: we break down from control and perception
As can be seen from the requirements of the actuator, it is necessary to perform fusion control of the longitudinal powertrain and the brake system, and the lateral steering system.
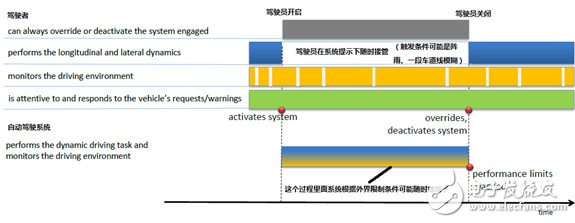
Figure 2 How L2 works
To analyze the perceived needs of L2, it is necessary to consider the entire scenario clearly.
Low-speed automatic parking scene: sensing parking spaces, pedestrians, vehicles
Low-speed loop traffic jam assist scene: identify vehicles, motorcycles, lane lines
High-speed closed road scene: identifying vehicles and lane lines
The L2 system we see in reality has both a TJA implemented by a single camera and a lot of differentiated designs. Here, because of the requirement of the driver to monitor the environment at any time, the car company can choose to do less and choose to do more, because whether it is perception or driving decision, it is completely adjusted according to the different needs of the car enterprise for L2 automatic driving.
There is a low-cost solution that takes one LRR, five SRRs, two cameras, and a single camera for processing.
It is possible to carry out vehicle centering only by lane recognition, and also to achieve matching and centering of lanes by means of high-precision positioning and high-speed road map, and to improve lateral control characteristics.
The core difference here is to limit the following:
Tolerance to different roads and infrastructure
Speed ​​range
Tolerance to perceptual errors (false recognition rate)
The feasibility of improving the autopilot system in different traffic environments, the possibility of evolution to L3
Judging the use of car owners to assess comprehensive risk
When we take this out for discussion, we can actually consider the specification of a project, and then test and benchmark according to the configuration of each car company. So in general, this L2 is a must for all car companies to accumulate and improve their characteristics.
L3 limited autopilotUnder certain circumstances, the driver can completely abandon the control and hand it to the automation system for control. If there is a problem with the system, it is impossible to completely enter the safe state, and the driver needs to take over, but this time is generally shorter. Although this does not seem to be practical, it is indeed a point that Germany's three luxury car companies are currently valued in their own system evolution. These published research configurations are all based on the evolution of L2.
Without the confirmation of the driver, the overall perception requirements are much higher:
Accuracy requirements are high, can not go wrong, there must be a fusion contrast here;
The range of sensing distance is high, and it is necessary to give autopilot decision time;
High environmental tolerance, sudden hail and heavy rain also take time to switch;
Even if an error occurs in the system, the exit of the entire conversion takes time;
The sensing system must have redundancy requirements, both in the case of convergence, as well as the requirements of fail-operaTIonal after failure diagnosis of a single sensing unit, and must also operate independently.
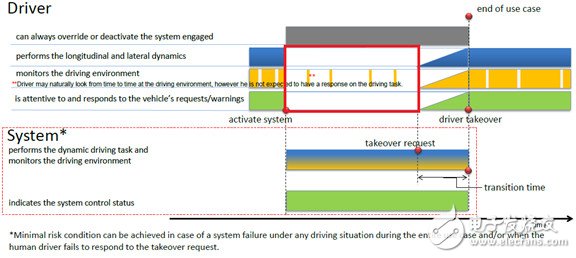
Figure 3 L3 system situation
Because L3 has not entered the productization, the configuration of these research phases may be further adjusted. It can be seen that the L3 phase is the evolution of the previous L2 top-level configuration performance. Due to the loss of driver monitoring during operation, any operational perceptual error is unacceptable (no problem will occur if the car is not seen, and problems will occur).
L4 fully automatic drivingBefore Ford made it clear that L4's autopilot and autopilot services were not available, no car company would dare to do so, because once it was started, there was no requirement for the driver. More to see before, it is still based on limited operation of airport small low-speed shuttle buses, urban low-speed buses.
100% of the system is responsible for the accuracy of perception
The system 100% must complete all the drivers to do within the set range, no backup
When the system changes its own problems and the external environment changes, it must consider redundant strategies to ensure the safety inside and outside the vehicle.
All troubleshooting of its own perception, processing and execution segments
Fail-OperaTIonal that senses, processes, and executes segments itself
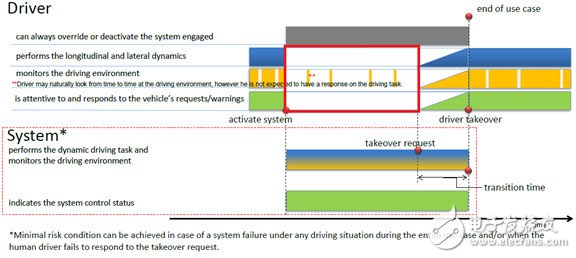
Figure 4 L4 operation
At this stage, the design considerations of L4 are also equipped with a safety driver. The situation here is more subtle. First, performance is done, and redundancy is made. In the next stage, L4 is completely considered. It will not be discounted here.
This article is taken from the article by Zhu Yulong, an automotive engineer.
This series features transparent LED screens, which are suitable for various indoor places and various stores, especially in storefronts with floor-to-ceiling glass windows. Installing the transparent screen against the glass wall has a very good effect. When the display is turned off, the audience can watch the indoor environment from the outdoors, and when the display is turned on, they can directly watch the content played on the display.It not only preserves the visibility in the store, but also can effectively display advertising videos to the other party, which is very practical.

Transparent Led Screen,Led Wall Display,Building Led Display Panel,Sport Led Screena
Guangzhou Cheng Wen Photoelectric Technology Co., Ltd. , https://www.leddisplaycw.com