This year, a Tesla MODEL S in the United States opened a car-driven mode, causing a driver's death. This is the first known car accident that has caused death since the application of autonomous driving technology.
Tesla Autopilot death accident analysis
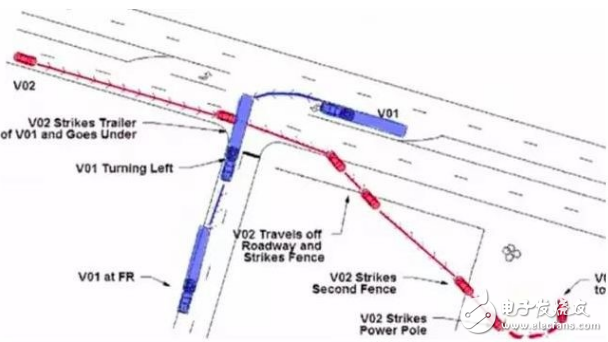
According to the accident analysis after the event, the Tesla MODEL S autopilot was on at the time, and the vehicle was driving on a two-way road with a central isolation belt. At this time, a contrarian trailer was driving at Tesla MODEL S. Turn left in front. Under the influence of backlighting, the sensors of the Tesla MODEL S did not successfully detect the presence of a turning trailer, which caused the vehicles to collide directly. It can be seen that the simple use of radar, camera, Lidar sensor perception has certain limitations, the scope of detection is limited, once the perception is wrong, no target is found, or the discovery is not timely, tragedy may occur. .
So if there is a range of sensors that can be sensed on the car, that is, beyond the range of the over-the-horizon range, if there is an auxiliary high-precision map.
We can know that there is a junction in front of it, and it is a three-way intersection. We know the shape of this intersection, there are two lanes, and it is even possible to know that this intersection often has large trailers. After knowing the above information, The decision-making system of the self-driving vehicle requires the vehicle to decelerate in advance when approaching the intersection, and knows that it is safer to drive to the left, so it can be changed to the left lane in advance, in combination with the course of the road and the time and weather at that time, the vehicle also The camera's exposure parameters can be adjusted appropriately to reduce the effects of backlighting, etc. Perhaps with this information, such accidents can be avoided.
So what is the high-precision map we mentioned here?The so-called high-precision map is actually compared with the ordinary navigation electronic map that we have now popularized.
The so-called high precision, in fact, on the one hand, that the absolute coordinate precision of the high-precision electronic map is higher, the so-called absolute coordinate precision refers to the precision between a certain object on the map and the real external world. On the other hand, the road traffic information elements contained in the high-precision map are richer and more detailed.

The absolute coordinate accuracy of the ordinary navigation electronic map is about 10 meters. Since it is used by the driver for navigation, the positioning accuracy of the GPS device is also about 10 meters, so the accuracy has little effect on the whole.
The high-precision map applied in the field of automatic driving will not work. The self-driving car needs to know exactly what position it is on the road. The vehicle is also about tens of centimeters away from the road and the lane next to it, so the absolute map is absolutely absolute. Accuracy is generally at the sub-meter level, which is within 1 meter of accuracy, and the relative accuracy of the lateral direction (for example, the relative positional accuracy of lanes and lanes, lanes and lane lines) tends to be higher. And high-precision maps not only have high-precision coordinates, but also accurate road shapes, and the slope, curvature, heading, elevation, and roll data of each lane are also included.
Ordinary navigation electronic maps will depict roads, and high-precision maps will not only depict roads, but also depict how many lanes on a road will actually reflect the actual style of the road, such as real roads widening in some places. Then, the road data in the high-precision map is also widened, and some places are narrowed because of convergence, and the high-precision map is the same.
In addition, what is the lane line between each lane and lane, is the dotted line, is the realization of the double yellow line, the color of the line, the isolation belt of the road, the material of the isolation belt, what the road teeth look like, what materials, and even The arrows on the road, the content of the text, and the location will be described.
Moreover, for the purpose of automatic driving, such as the speed limit of each lane, the recommended speed also needs to be provided. And like crosswalks, billboards along the road, isolation belts, speed limit signs, traffic lights, roadside phone stops, etc., we usually refer to the absolute geographical coordinates of the traffic participants, physical size and their characteristics. Appears in high-precision data.
In addition, a common difference between ordinary navigation electronic maps and high-precision maps is that ordinary navigation electronic maps are map data for drivers and drivers, while high-precision maps are machine-oriented for autonomous vehicles. Map data.
The ordinary navigation system provides basic road navigation functions based on common navigation electronic maps, including path planning from A to B, location matching of vehicles and roads, POI retrieval for query destinations, combined with map display and road guidance. The functions and the like, and the human being as the driver has the ability to extract information, correlate information, filter information, and visually judge. The relatively rough information provided by the navigation system is sufficient for daily navigation and driving.
However, as an autonomous vehicle, it is impossible to complete tasks such as association, solution, information integration, etc. Maybe one day artificial intelligence is enough for the enemy brain, but it is still far from the height of the human brain, so it is necessary to provide detailed map information. . Therefore, high-precision maps need to be assisted to achieve high-precision positioning position functions, road-level and lane-level planning capabilities, and lane-level guidance capabilities. On the contrary, the current high-precision map, because the amount of information contained in the cover is too rich, if used directly to the driver, it will cause interference.
Here again, there is a map between the common navigation electronic map and the high-precision map, and an application in ADAS (Active Security Scene). The accuracy of this kind of map is generally about 1-5 meters. It is expanded on the basis of ordinary navigation electronic maps, such as adding some auxiliary information of slope, curvature and heading on the road, and also covers The number of lanes, the information of the lane width, and the accuracy and shape information of the road are more accurate. Only the accuracy of this information is an order of magnitude difference from high-precision maps. This type of map can also be used to support autonomous driving when the sensor of the self-driving vehicle is sufficiently rich, and most of his application scenarios are mainly for active and safe use.
The Taihang Jiaxin charger is controlled by a solid-state thyristor with electronic sensing and monitoring functions. The main function of the charging system is to charge the battery without supervision while providing a continuous load. The charging characteristic is a constant potential with a current limit. The charger rectifier circuit provides 100% of the rated current, while the float/boost charges a group of lead-acid batteries. The system is also suitable for maintenance and non-maintenance operations.









Battery Charger,Lipo Battery Charger,Hf Battery Charger,Three Stage Battery Charger
Xinxiang Taihang Jiaxin Electric Tech Co., Ltd , https://www.chargers.be