The teach pendant is a handheld device for manual manipulation, programming, parameter configuration and monitoring of the robot.

The picture above is the ABB robot teach pendant, where A is the connection cable between the teach pendant and the control cabinet, B is the touch screen, C is the emergency stop switch, D is the manual joystick, and E is the USB interface for data backup and recovery ( U disk/mobile hard disk and other storage devices can be inserted), F is the enable button.
2. Enable button
The enable button is designed to ensure the personal safety of the operator. The enable button is divided into two levels. In the manual state, when the first level is pressed, the robot will be in the motor-on state. Only when the enable button is pressed and kept in the "motor on" state can the robot be manually operated and program debugged.
When the second gear is pressed, the robot will be in a protective stop state. When danger occurs (out of fright), people will instinctively release or press the enable button. In both cases, the robot will stop immediately, ensuring the safety of people and equipment.
3. Manual operation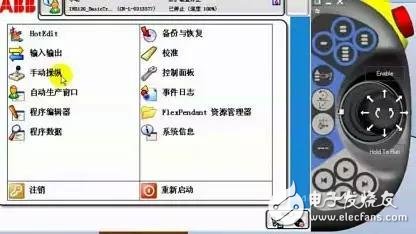
Click on the screen to select "Manual Operation".

Click "Action Mode".

In the action mode, ABB robots have a total of three operating modes. They are "single axis motion", "linear motion", and "repositioning motion".
4. Single axis movement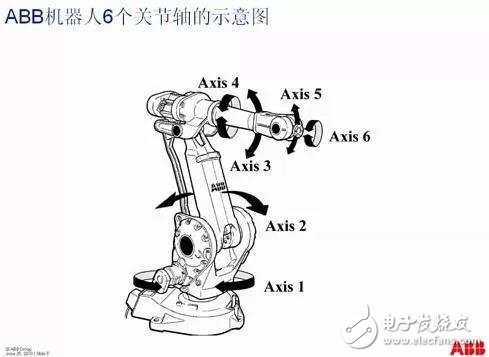
In the action mode, select axis 1-3. Press the enabler to the first gear, the manual joystick can control the movement of Axis1 in the left and right direction, the movement of Axis2 in the up and down direction, and the movement of Axis3 by rotating the joystick.
In operation mode, select axis 4-6. Press the enabler to the first gear, the manual joystick can control the movement of Axis4 in the left and right direction, the movement of Axis5 in the up and down direction, and the movement of Axis6 by rotating the joystick.
5. Skills for using joystickWe can compare the joystick of an ABB robot to the accelerator of a car, and the amount of turning or rotation of the joystick is related to the speed of the robot.
(1) If the range of pulling or rotating is small, the robot will run slowly.
(2) If the range of pulling or rotating is large, the robot will run at a relatively slow speed.
Special reminder: When manually operating the robot, try to operate the joystick as small as possible to make the robot run at a slow speed with higher controllability.
60V Battery Pack ,Battery Pack With Outlet,Back Up Battery Pack,Ev Battery Pack
Zhejiang Casnovo Materials Co., Ltd. , https://www.casnovonewenergy.com