1 Introduction
In the common household appliances, the rice cooker radiation is very weak, and the radiation of the TV and the computer is similar. The electromagnetic oven has the largest amount of radiation, and even the substation radiation that people are concerned about is only one-tenth of the household induction cooker. Some media reports that the induction cooker generates extremely low-frequency electric and magnetic fields during its work. The World Health Organization regards extremely low-frequency electromagnetic fields as suspicious carcinogens, and is a class of carcinogens similar to benzene and electric welding fumes. Therefore, it seems that the problem of reducing the radiation field strength of the induction cooker and how to reduce the EMI of the induction cooker seems to be imminent.
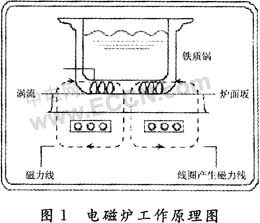
Induction cooker adopts the principle of magnetic field induced eddy current heating, which uses current to generate magnetic field through the coil. When the magnetic force in the magnetic field passes through the bottom of the iron containing pot, it will produce countless small eddy currents, so that the pot itself will heat up at high speed and then heat the pot. food. There are three main types of interference from the induction cooker to the surrounding equipment: conducted interference; space radiation interference; electromagnetic waves generated during the operation of the induction cooker cannot be completely absorbed by the shield at the bottom of the coil and the iron pot on the top plate, which is harmful to human health and Other electronic devices are harmful. Due to limited time and experimental conditions, the filters used in the experiments in this paper mainly solve the conduction interference of the induction cooker.
2 Experimental circuit schematic and parameter selection
The schematic diagram of the circuit used in the experiment is shown in Figure 2.
  |
La and CY1, Lb and CY2 form two pairs of low-pass filters for suppressing common mode interference signals present on the phase-ground, neutral, and ground lines, respectively.
La, Lb are two independent coils wound on the same ferrite magnetic ring. They have the same number of turns and the coils are wound in opposite directions. After the filter is connected to the circuit, the magnetic flux generated by the current in the two coils is magnetic. The rings cancel each other out and do not cause the magnetic ring to reach a magnetic saturation state, so that the inductance values ​​of the two coils La and Lb remain unchanged. However, for various reasons, the inductance of La and Lb may not be exactly equal. Then the difference between La and Lb is called the differential mode inductance. He and the Cx3 low-pass filter can be used to suppress the differential mode interference signal between the phase line and the neutral line.
Transient suppressors D1, D2 can be used to effectively suppress transient pulses.
The hardware circuit fabricated according to FIG. 2 has low cost, small size, and high practicability. During the design and production process, it should be noted that the traces of the circuit board should be thick enough, otherwise it is easy to blow after power-on; the components on the circuit board should be placed side by side in the order of the schematic diagram, and the traces should not be bypassed. The specification of the circuit board can make the experiment achieve better results.
3 test buy process and conclusion
For the sake of safety during the test, a current transformer is connected in series between the power supply and the filter. Current transformers work like a transformer and can turn large currents into small currents. The secondary coil output of the current transformer is connected to a load resistor for connecting to the input port of the oscilloscope.
The external equipment used in this test was a Galanz brand induction cooker that can operate at 6 different powers: 300 W, 900 W, 1100 W, 1 300 W, 1 500 W, 1 800 W.
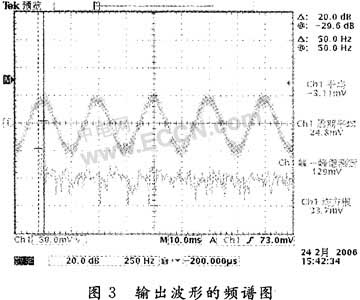
The test experiment used a TDS3000 series oscilloscope to observe the waveform spectrum. In the electromagnetic compatibility technology, the frequency domain analysis method is more used. In the electromagnetic compatibility analysis, since the limits of the emission in all the electromagnetic compatibility standards are specified in the frequency domain, in order to facilitate comparison with the standard, Frequency domain analysis is used, and the analysis of electromagnetic compatibility problems focuses on the energy distribution at a particular frequency, with little attention to time, phase, and so on. Therefore, this experiment stores and analyzes the output spectrum of the induction cooker at 900 W and 1 800 W, when the filter is connected and when the filter is not connected.
The induction cooker works at 900 W. When the filter is not connected, the spectrum of the output waveform is shown in Figure 3:
 |
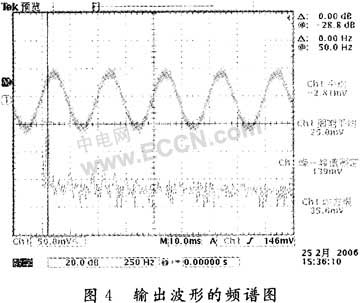
When the induction cooker is working at 900 W and the filter is connected, the spectrum of the output waveform is shown in Figure 4:
 |
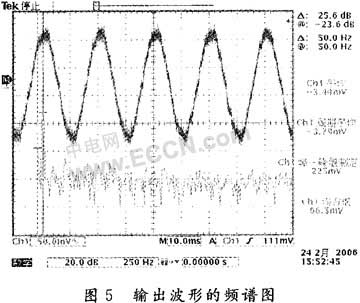
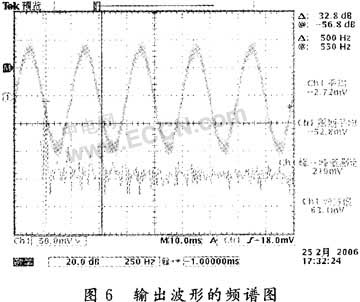
The induction cooker works at 1 800 W. When the filter is not connected, the spectrum of the output waveform is shown in Figure 5:
 |
 |
Due to the relationship between experimental conditions and time, specific experiments and data image recordings were performed only for the induction cooker. In fact, this method can not only improve the electromagnetic interference of the induction cooker simply and effectively, but also effectively improve other household electronic and electrical equipment with more serious interference, and has wide applicability.
:
Office Window Cleaning Robot apply to office, home, hotel, shop and so on. You can saves the labor, money, energy using smart window robot clean office. Office window robot is suitable for frame glass (rimless glass is also ok), door, wall. The noise is only 48dB when you use window robot clean office, giving you a quite environment.
Specifications of robotic window cleaner:
Dimensions: L252.7 * W252.4 * H60mm
Weight: 1.8kg
Cleaning speed: 1′40″/㎡
Applicable Area: ≤100㎡
Working height: No limited
Anti-drop control: UPS / safety rope
Detection window frame: Auto recognition
Operation: Automatic / remote control
Alarm prompt function: Voice alarm
If there is anything confusing you, please feel free to contact me for further discussion. Our factory is in Shenzhen, China. Welcome to visit. It will be our honor to see you.
Office WINDOW CLEANING ROBOT
Office Window Cleaning Robot,Building Window Cleaning Robot,Office Building Window Cleaning Robot,Window Cleaning Robot For Office
Zhengzhou Bangmi Smart Technology Co., Ltd. , http://www.globalcleanrobot.com