This article is mainly about the relevant introduction of the PWM waveform generator, and focuses on the principle and application of the PWM waveform generator for a detailed description.
Why use PWM wave1: PWM is PULSE WIDTH Modulation-rectangular pulse waveform, you can understand it as a square wave with adjustable duty cycle.
2. DSP can directly output PWM wave, so no additional hardware connection is required. However, the drive capacity of DSP output is limited, and the drive motor must be additionally amplified with a drive circuit.
3. Take the EVA unit of the DSP as an example. The 2 general-purpose timers of the EVA can generate 2 independent PWM waves, and the 3 comparison units can generate 6 pairs of PWM waves with dead zones. (1) T1CNT generates asymmetrical PWM wave for continuous counting mode. At this time, the period of PWM is (t1pr+1)/tclk, t1pr is the period register value, and TCLK is the time required for each count of the current timer. (2) T1CNT generates symmetrical PWM waves for continuous increment and decrement counting. The period is 2T1PR/tclk. The procedure is as follows: void InitEV(void) {
EvaRegs.T1PR=5000;EvaRegs.T1CMPR=2500//It is not generated in this way; EvaRegs.T1CNT=0//The initial value of timer 1 is set to 0; EvaRegs.T1CON.ALL=0x144E//Continuous increase mode, enable Timer 1 and set the period of T1P; EvaRegs.CMPR1=500;//Use the comparison unit to output PWM; EvaRegs.ACTR.all=0x0006//Set the output control location effective or high effective; EvaRegs.DBTCON.all=0x0530// Enable the dead zone timer, the dead zone time is 5 times the timer time; EvaRegs.COMCONA.all=0xa600//When the comparator controls A operation
Principle and application of pwm waveform generatorThe general sampling SPwM method is divided into the natural sampling method and the regular sampling method. The natural sampling method compares the reference sine wave with a carrier triangle wave, and determines the switching mode by the intersection of the two. Since the mathematical model obtained by the natural sampling method needs to solve the transcendental equation, it is not suitable for the real-time control of the microcontroller, and because the symmetrical waveform is verified by practice to cause less harmonic distortion in the phase current of the three-phase power than the asymmetrical waveform. We use the symmetric regular sampling method as the mathematical model of this system.
Here is an explanation of the principle of using TI’s DSP chip TMS320LF2407 (hereinafter referred to as 2407) to generate a PWM signal: because a PWM signal needs to have a suitable timer to repeatedly generate a counting cycle that is the same as the PM cycle, and a comparison register is used To maintain the modulation value, therefore, the value of the compare register should be constantly compared with the value of the timing register. In this way, when the two values ​​match, a transition (from low to high or from high to high) will be generated on the output of the response. To low), the output pulse is generated. The turn-on (or turn-off) time of the output is proportional to the modulated value. Therefore, changing the modulating value will also change the width of the pulse signal output on the relevant pin.
Through the event manager module of TMS320LF2407, a PwM pulse signal with a certain duty cycle can be generated, and the general-purpose timer, full comparison unit and single comparison unit can be used to send out PWM pulses. The Pw port of DSP can output a series of etc. PwM waveform signals with unequal widths, after these signals are transformed by the peripheral series of conditioning circuits, the required three-phase AC sine wave signals can be obtained. In fact, in terms of hardware, DSP has two event management modules (EVAZEVB) with the same design. Each event management module has 6 PWM output ports, so it can output two sets of three-phase SPWM waves, which can generally meet the usual requirements. the design of.
Generally, AC motors and static inverters usually use this waveform; (b) is the third harmonic (enhanced waveform), this waveform includes 3 odd harmonics, the output power is increased by 20%, and the three-phase harmonics Cancel each other to prevent the motor from heating; (c) is the third harmonic with dead zone (high-efficiency waveform), and further optimizes the third harmonic. In one cycle, the switches on the high-voltage side and the low-voltage side maintain a 60° gap, not only It saves 33% of the switching loss, and can use fewer and cheaper power devices or reduce the volume of the heat sink, which improves the reliability of the power switch.
The pwm generator is the core of the pulse sequence. The pulse modulation signal is obtained by comparing the input reference waveform and the high frequency carrier. sa866de adopts the modulation method of asynchronous asymmetric regular sampling, and its working principle is shown in Figure 3. The reference waveform provided by sa866de for users is stored in the on-chip rom in digital form. sa866de uses digital modulation technology to avoid drifting when using analog devices. The triangle wave (carrier) is synthesized by an up/down counter and compared with the modulated wave through a digital comparator. The modulation wave is sampled on the rising and falling edges of each carrier wave peak, which is called "double-edge regular sampling". The modulation wave is stored in the on-chip rom in digital form (1536 sampling points/360°). The switching frequency is controlled by the ratio of a specific address in the rom, which has nothing to do with the carrier frequency of sa866de, so it is called the "asynchronous pwm method". The pwm waveform finally outputs three pairs of complementary signals to drive the upper and lower switching tubes of the three-phase inverter bridge respectively. Each phase output control circuit is composed of a pulse cancel circuit, a pulse delay circuit and a power drive circuit. The pulse cancel circuit is used to remove the pulse whose pulse width is less than the cancel time; the pulse delay circuit guarantees the dead time interval to prevent the switching device between the upper and lower bridge arms from generating a through phenomenon at the moment of conversion, so as to make the inverter reliable commutation; drive circuit Used for pwm waveform output power amplification, so that it can directly drive the photoelectric coupling device to achieve isolation.
Speed ​​and acceleration/deceleration control logic
Speed ​​control is introduced from the set-point terminal through the speed setting potentiometer, and converted into the corresponding target value by a 10-bit high-speed a/d converter. The acceleration and deceleration control is mainly composed of a 16-bit amplitude comparator and a 17-bit up/down counter. The clock of the up/down counter is provided by the acceleration/deceleration oscillator, and the acceleration/deceleration rate can be set independently, and it is controlled by the osc/clk input state in 3 ways. The acceleration/deceleration rate setting terminal raccel/rdecel respectively connects external resistors and capacitors to determine the acceleration/deceleration oscillator frequency. Whether to implement acceleration/deceleration should also be determined by the input signal value of the voltage monitoring terminal vmonitor and the current monitoring terminal imonitor.
v/f control
In order to adapt to various occasions, to ensure that sa866de can control the voltage amplitude at any frequency, there are two v/f control methods to choose from. Linear way and quadratic way. In order to reduce the copper loss, the base voltage is set to be adjustable, and then the voltage and frequency rise to the specified value according to the linear relationship and the quadratic relationship. The linear v/f operation makes the frequency rise to the specified value in the constant torque region. Outside the constant torque zone, the amplitude maintains its maximum value, but as the frequency increases, the torque continues to decrease, and the power remains unchanged. This is called the constant power zone. The shape of the v/f characteristic curve is determined by an 8-bit precision programmable parameter.
Mode selection
Set the serial pin to 1 or leave it unused, you can select the mode n1~n3, these three modes are normal working modes, and all parameters are read in by the external eeprom. Set the serial pin to 0 to select modes s1~s2. Both of these modes are serial working modes. The microprocessor/microcontroller replaces the external eeprom and loads the initialization parameters serially.
sa866de has a microwire three-wire serial interface, which is compatible with 256 or 1024-bit serial bus type eeprom. The storage unit of eeprom is divided into 4 pages, each page is 4 16-bit words, each contains a set of parameters. Page selection is determined by the first address command sent by sa866de to eeprom and the number of digits read, so there are four sets of parameters for each product to choose from, determined by the two logic pins of page0 and page1.
As shown in the figure above, the system adopts an external eeprom mode. The selected eeprom is at93lc46 produced by atmel. All programmable parameters are stored in the eeprom. Page0 and page1 are used to select 4 pages of data in the memory 93lc46. After the system is powered on or reset, it will automatically download through the serial port. sa866de works in mode n3, the racc and rdec pins are connected to high level, and the serial terminal is left floating. The trip terminal is connected to a light-emitting diode to indicate that the system is faulty and blocked.
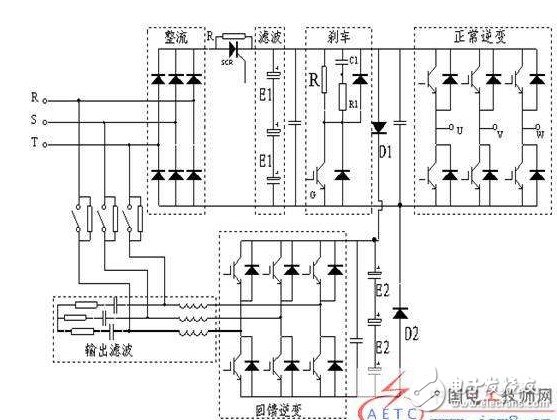
The main circuit input of the system is three-phase AC power drawn from the power grid. After rectification and filtering, the stable DC power is supplied to the power conversion device. After the power conversion device frequency conversion, a three-phase AC power drive AC motor is formed. The power conversion device uses a highly integrated intelligent power module (ipm), which integrates power conversion, gate drive and protection circuits, and has system protection functions such as drive undervoltage, switch overcurrent, bridge arm short circuit and overheating. The settrip terminal of sa866de is connected to the protection output terminal of ipm. Once the protection signal is detected, the protection high level is quickly sent to sa866de, the circuit is cut off at high speed, and the pwm output is turned off.
The control circuit is the core of the entire variable frequency speed regulation system. The entire control circuit only needs to use a three-phase PWM waveform generator chip sa866de to achieve PWM signal output, system protection and other functions. The 12-speed speed adjustment is easily realized through the acceleration/deceleration rate setting terminal raccel/rdecel and the voltage monitoring terminal vmonitor and the current monitoring terminal ionitor. The forward and reverse rotation of the motor is controlled by the dir terminal. Therefore, the system circuit structure is simple, and the control and adjustment are convenient. Very high intelligence.
ConclusionThat's it for the related introduction of pwm waveform generator, I hope this article can be helpful to you.
Related reading recommendation: SPWM waveform generator design and application Related reading recommendation: PWM basic principles and introductionAc Magnetic Contactor,Ac Electrical Contactor,Ac Series Contactor,Ac Contactor For Switching Capacitor
NanJing QUANNING electric Co.,Ltd , https://www.quanningtrading.com