This article is mainly about the relevant introduction of the sd5000 frequency converter, and focuses on the use of the sd5000 frequency converter and the selection of the frequency converter in detail.
How to use sd5000 inverter
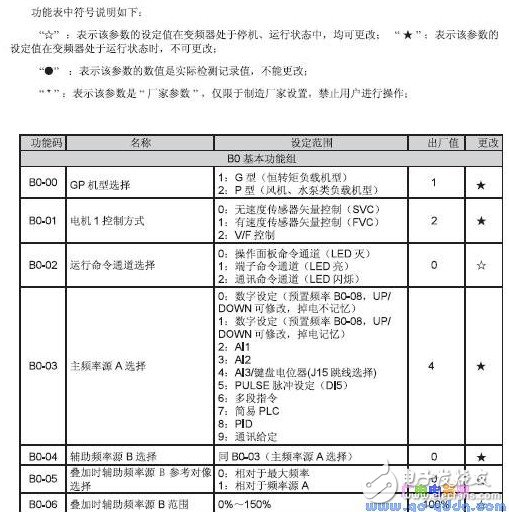
Function parameters of sd5000 inverter
A frequency converter (Variable-frequency Drive, VFD) is a power control device that uses frequency conversion technology and microelectronics technology to control an AC motor by changing the frequency of the motor's working power supply. The frequency converter is mainly composed of rectifier (AC to DC), filtering, inverter (DC to AC), braking unit, drive unit, detection unit and micro-processing unit. The inverter adjusts the voltage and frequency of the output power supply by breaking the internal IGBT, and provides the required power supply voltage according to the actual needs of the motor, thereby achieving the purpose of energy saving and speed regulation. In addition, the inverter has many protection functions. , Such as overcurrent, overvoltage, overload protection and so on. With the continuous improvement of industrial automation, frequency converters have also been widely used.
Inverter control methodway to control
The low-voltage universal variable frequency output voltage is 380~650V, the output power is 0.75~400kW, the working frequency is 0~400Hz, and its main circuit adopts AC-DC-AC circuit. Its control method has gone through the following four generations.
First generation
1U/f=C sinusoidal pulse width modulation (SPWM) control method:
It is characterized by simple control circuit structure, low cost, and good mechanical properties, which can meet the smooth speed regulation requirements of general transmission. It has been widely used in various fields of industry. However, when this control method is at low frequency, due to the lower output voltage, the torque is significantly affected by the stator resistance voltage drop, which reduces the maximum output torque. In addition, its mechanical characteristics are not as hard as a DC motor after all, its dynamic torque capability and static speed regulation performance are not satisfactory, and the system performance is not high, the control curve will change with the change of the load, the torque response is slow, and the motor rotates. The torque utilization rate is not high, and the performance decreases due to the existence of the stator resistance and the dead zone effect of the inverter at low speed, and the stability becomes worse. So people have researched vector control frequency conversion speed regulation.
Second generation
Voltage space vector (SVPWM) control method:
It is based on the premise of the overall generation effect of the three-phase waveform, with the purpose of approximating the ideal circular rotating magnetic field trajectory of the motor air gap, generating three-phase modulation waveforms at one time, and controlling in the manner of inscribed polygons approaching a circle. After practical use, it has been improved, that is, the introduction of frequency compensation can eliminate the error of speed control; the amplitude of the flux linkage is estimated through feedback to eliminate the influence of stator resistance at low speed; the output voltage and current are closed-loop to improve the dynamic accuracy and stability. But the control circuit has many links and no torque adjustment is introduced, so the system performance has not been fundamentally improved.
Third Generation
Vector control (VC) method:
The method of vector control variable frequency speed regulation is to convert the stator currents Ia, Ib, Ic of the asynchronous motor in the three-phase coordinate system into the AC current Ia1Ib1 in the two-phase static coordinate system through the three-phase to two-phase transformation, and then pass According to the directional rotation transformation of the rotor magnetic field, it is equivalent to the DC current Im1 and It1 in the synchronous rotating coordinate system (Im1 is equivalent to the excitation current of the DC motor; It1 is equivalent to the armature current proportional to the torque), and then imitates the DC motor's The control method is to obtain the control quantity of the DC motor, and realize the control of the asynchronous motor through the corresponding coordinate inverse transformation. Its essence is to equate an AC motor to a DC motor, and independently control the two components of speed and magnetic field. By controlling the rotor flux, and then decomposing the stator current to obtain the two components of torque and magnetic field, through coordinate transformation, orthogonal or decoupling control is realized. The proposal of the vector control method has epoch-making significance. However, in practical applications, because the rotor flux linkage is difficult to accurately observe, the system characteristics are greatly affected by the motor parameters, and the vector rotation transformation used in the equivalent DC motor control process is more complicated, making the actual control effect difficult to achieve the ideal analysis. result.
Fourth Generation
Direct torque control (DTC) method:
In 1985, Professor DePenbrock of Ruhr University in Germany proposed the direct torque control frequency conversion technology for the first time. This technology largely solves the above-mentioned shortcomings of vector control, and has developed rapidly with novel control ideas, simple and clear system structure, and excellent dynamic and static performance. This technology has been successfully applied to high-power AC drives traction by electric locomotives. Direct torque control directly analyzes the mathematical model of the AC motor in the stator coordinate system, and controls the flux linkage and torque of the motor. It does not require the equivalent of an AC motor to a DC motor, thus eliminating many complex calculations in the vector rotation transformation; it does not need to imitate the control of a DC motor, nor does it need to simplify the mathematical model of the AC motor for decoupling.
Matrix cross-cross control method:
VVVF frequency conversion, vector control frequency conversion, and direct torque control frequency conversion are all AC-DC-AC frequency conversion. The common disadvantage is that the input power factor is low, the harmonic current is large, the DC circuit requires a large energy storage capacitor, and the regenerative energy cannot be fed back to the grid, that is, four-quadrant operation cannot be performed. For this reason, matrix AC-AC frequency conversion came into being. Since the matrix AC-AC frequency conversion eliminates the intermediate DC link, the large and expensive electrolytic capacitor is eliminated. It can achieve a power factor of l, a sinusoidal input current and four-quadrant operation, and the system has a high power density. Although the technology is not yet mature, it still attracts many scholars to study in depth. Its essence is not to indirectly control the current, flux linkage, etc., but to realize the torque directly as the controlled quantity. The specific method is:
1. Control the stator flux linkage and introduce the stator flux linkage observer to realize the speed sensorless mode;
2. Automatic identification (ID) relies on accurate motor mathematical model to automatically identify motor parameters;
3. Calculate the actual value corresponding to the stator impedance, mutual inductance, magnetic saturation factor, inertia, etc., calculate the actual torque, stator flux linkage, and rotor speed for real-time control;
4. Realize Band-Band control. According to Band-Band control of flux linkage and torque, PWM signals are generated to control the switching state of the inverter.
Matrix AC-AC frequency conversion has fast torque response (<2ms), high speed accuracy (±2%, no PG feedback), high torque accuracy (<+3%); it also has high starting Torque and high torque accuracy, especially at low speed (including 0 speed), can output 150% to 200% torque.
The control principle of VVC:
The control principle of VVC is to apply the principle of vector modulation to a fixed voltage source PWM inverter. This control is based on an improved motor model that better compensates for load and slip.
Because the active and reactive current components are very important to the control system, the angle of the control voltage vector can significantly improve the dynamic performance in the 0-12HZ range, while in the standard PWM U/F drive, the 0-10HZ range There are generally problems.
Using the principle of SFAVM or 60°AVM to calculate the switching mode of the inverter can make the pulsation of the air gap torque very small (compared to the inverter using synchronous PWM).
Selection of frequency converterSelect the type of frequency converter, according to the type of production machinery, speed regulation range, static speed accuracy, starting torque requirements, determine which control mode frequency converter is most suitable. The so-called suitable is not only easy to use, but also economical, in order to meet the basic conditions and requirements of the process and production.
1. The motor to be controlled and the inverter itself
1) The number of poles of the motor. Generally, the number of poles of the motor should not be more than (extremely suitable, otherwise the capacity of the inverter must be appropriately increased. 2) Torque characteristics, critical torque, and acceleration torque. In the case of the same motor power, relative to the high overload torque mode, the inverter specifications can be selected by derating. 3) Electromagnetic compatibility. In order to reduce the interference of the main power supply, a reactor can be added to the intermediate circuit or the input circuit of the inverter, or a front isolation transformer can be installed. Generally, when the distance between the motor and the inverter exceeds 50m, reactors, filters, or shielded protective cables should be connected in series between them.
2. Selection of inverter power
The efficiency of the system is equal to the product of the efficiency of the frequency converter and the efficiency of the motor, and the system efficiency is higher only when both work at higher efficiency. From the perspective of efficiency, when selecting inverter power, pay attention to the following points:
1) It is most suitable when the power value of the inverter is equal to the power value of the motor, so that the inverter can run at a high efficiency value. 2) When the power classification of the frequency converter is different from the power classification of the motor, the power of the frequency converter should be as close as possible to the power of the motor, but should be slightly larger than the power of the motor. 3) When the motor is frequently started, braked, or under heavy load starting and working more frequently, a higher-level frequency converter can be selected to use the frequency converter for long-term and safe operation. 4) After testing, the actual power of the motor is indeed surplus. You can consider using a frequency converter with a power lower than the power of the motor, but pay attention to whether the instantaneous peak current will cause overcurrent protection. 5) When the power of the frequency converter and the motor are not the same, the settings of the energy saving program must be adjusted accordingly in order to achieve a higher energy saving effect.
3 Selection of inverter box structure
The cabinet structure of the inverter must be adapted to the environmental conditions, that is, factors such as temperature, humidity, dust, pH, and corrosive gases must be considered. Commonly there are several structural types available for users to choose: 1) The open type IPOO type itself has no chassis, and is suitable for installation in the electric control box or on the screen, panel, and rack in the electric room, especially when multiple inverters are used in a centralized manner. This type is better, but the environmental conditions are more demanding; 2) The enclosed IP20 type is suitable for general use, and it can be used in occasions with a small amount of dust or a little temperature and humidity; 3) The sealed IP45 type is suitable for environments with poor industrial site conditions ; 4) The closed type IP65 type is suitable for the occasions with poor environmental conditions, water, dust and certain corrosive gas.
4 Determining the capacity of the inverter
Reasonable capacity selection is itself an energy-saving and consumption-reducing measure. According to existing data and experience, there are three simpler methods: 1) Determine the actual power of the motor. First determine the actual power of the motor to select the capacity of the inverter. 2) Formula method. When a frequency converter is used for multiple motors, it should be satisfied: at least the influence of the starting current of one motor should be considered to avoid the frequency converter from over-current tripping. 3) Inverter based on motor rated current method. The process of selecting the capacity of the inverter is actually the best matching process between the inverter and the motor. The most common and safer is to make the capacity of the inverter greater than or equal to the rated power of the motor, but the actual matching should consider the motor’s What is the difference between the actual power and the rated power? Usually, the selected capacity of the equipment is too large, but the actual required capacity is small. Therefore, it is reasonable to choose the inverter according to the actual power of the motor. Avoid using an excessively large inverter and increase the investment. . For light load, the inverter current should generally be selected according to 1.1N (N is the rated current of the motor), or according to the maximum motor power indicated by the manufacturer in the product that matches the output power rating of the inverter [1] .
5 main power
1) Power supply voltage and fluctuations. Special attention should be paid to adapt to the setting value of the inverter's low-voltage protection, because in actual use, the grid voltage is more likely to be low. 2) Main power frequency fluctuation and harmonic interference. This interference will increase the heat loss of the inverter system, resulting in increased noise and reduced output. 3) When the inverter and motor are working, their own power consumption. When designing the main power supply of the system, both power consumption factors should be taken into consideration.
ConclusionThis is the end of the relevant introduction about the frequency converter. If there are any deficiencies, please correct me.
Related reading recommendation: This article takes you to quickly understand the inverter Related reading recommendation: The working principle and wiring diagram of the inverter
Features
â—† Designed For Water and Dust Tight(IP67)
â—† Small Compact Sizeâ—† UL&ENEC&CQC Safety Approvals
â—† Long life & high reliability
â—† Variety of Levers
â—† Wide Range of wiring Terminals
â—† Wide used in Automotive Electronics,Appliance and Industrial Control etc.
â—† Customized Designs
Micro Lever Switch,Enec Micro Switch,Ip67 Rotary Switch,Snap Action Micro Switch
Ningbo Jialin Electronics Co.,Ltd , https://www.donghai-switch.com