Driven by the proliferation of high-quality sensors, reliable connectivity and data analysis, industrial efficiency has taken a new step, and the automation and mobility of these smart nodes can be improved.
In these cases, precise motion capture and position tracking of the sensor nodes are at the heart of the application's success or failure –
Smart farms can use integrated ground vehicles and aircraft to more effectively guide ground operations based on rich geographic location, sensor content, and analytical learning outcomes;
The intelligent operating room brings classic guiding technology to the operating table for use with precision guided robotic arms, using sensor fusion technology to ensure precise guidance under all conditions.
In many areas, motion-based sensors have become value multipliers for mobile applications.
The consumer-type inertial sensors that are ubiquitous in mobile phones have made people generally disappointed with their accuracy. Therefore, there has been little success in promoting the concept of the Internet of Things (IoMT). However, the new high-performance industrial sensors can support precise angular pointing and precise geolocation performance while achieving the necessary size and cost efficiency requirements, and are now ready to move the development of the mobile Internet of Things.
 The driving force of intelligent detection of industrial systems
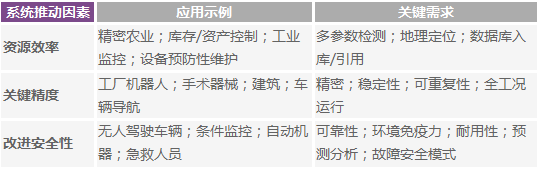
The driving force of intelligent detection of industrial systems The most valuable advances in industrial machinery and processes focus on tangible system-level advantages, which often present design and implementation challenges that in turn evolve into new problem solutions and business models. This system-level driver can be summarized into three pursuits, namely the pursuit of resource efficiency, critical precision and higher security. Targeting these improved applications across multiple industries, including across air/ground/sea, indoor/outdoor, short/long term, and people/machines, but in any case, they rely on common attributes; accuracy, reliability , security and intelligent processing and analysis, as shown in Table 1.
Table 1. Important system attributes for moving IoT applications turn into challenging design requirements
Multiple types of sensors are at the heart of the target application design task. The system complexity involved in the target design requires careful consideration of sensor quality and robustness based on widely varying conditions. While some industries may choose sensors for convenience (for example, using a combination of sensors already on the phone), other industries redesign sensor combinations to make choices based on accuracy and intelligently combine sensors to comprehensively Reliably cover the target system state.
 Intelligent detection
Intelligent detection In the context of the existence of a large number of sensors, these emerging intelligent systems are revolutionizing some so-called mature industries, turning agriculture into intelligent agriculture, turning infrastructure into intelligent infrastructure and turning cities into smart cities. As sensors are deployed in these environments to gather relevant contextual information, new challenges arise in database management and communication, requiring not only data fusion between sensors, but also cross-platform, cross-time complex integration (eg, Cloud-based analysis of infrastructure conditions across time, crop yields, traffic conditions and patterns from previous years, as shown in Figure 1.
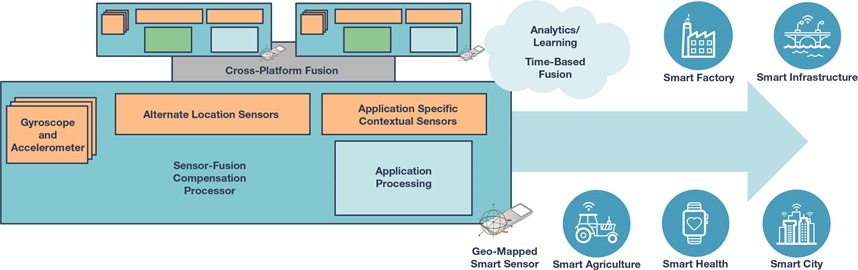
Figure 1. Emerging work requirements combine context and motion detection with multi-layer convergence.
The decision to reliably extract information from devices and the environment is a key metric for the ultimate utility and growth prospects of these emerging applications. Accuracy drives efficiency, which in turn translates into the necessary economic factors and is key to ensuring safe and reliable operation. Although most basic sensors can add simple functions, these simple functions cannot meet the needs of the target moving IoT application. In such applications, the status of yes/no, up/down, on/off, etc. will be finer. Instead of the resolution, the added functionality affects the choice of sensor.
The importance of sports In most cases, the Internet of Things is in motion. Even if it's not in motion—for example, a stationary industrial security camera—precision pointing may still be necessary, or knowledge about unwanted motion (tampering) can be very valuable. If accurate pointing angles can be maintained under harsh flight conditions, drones that capture crop images with optical loads are likely to deliver better results faster; if accurate geographic mapping information can be provided for optical data, then It is possible to achieve a historical comparison of data and trends. Intelligent vehicles, whether they are ground vehicles or air or sea vehicles, are increasingly relying on GPS navigation. However, GPS is subject to increasing precision pressures, whether intentionally or naturally (buildings, trees, tunnels, etc.). If the accuracy requirements are taken into account in the selection, the additional sensors can still reliably perform heading angle calculations during the interruption of the accident. Table 2 lists some of the factors that make the M (motion) concept in IoMT (Sports IoT) a reality, paying attention to the relationship between motion and general-purpose applications.
Table 2. The lack of sports knowledge and even sports knowledge is related to the success or failure of multiple applications.

If there is an opportunity and means to capture the natural inertia of the device or person, the extracted system state meaning is enhanced and may be properly blended with the available context information, as shown in Table 3.
Table 3. Location Detection is a value multiplier for the Internet of Things

Reliable and secure mobile IoT node The effectiveness and value of the output of the IoT node is most dependent on the quality of the core sensors and their ability to capture application contexts with high fidelity. Therefore, fusion processing is an inevitable choice for sensor correction/enhancement and is a prerequisite for ideally capturing state dynamics between sensors (eg, which sensor is most reliable at any given point in time). Application-level processing is integrated into the solution in a layered manner and optimized for environmental characteristics, including appropriate boundary conditions. Although this approach is automatic, in some cases these nodes work together, such as in unmanned vehicles that are grouped on the ground or in the air. In these cases, a secure link is deployed that emphasizes reliable transmission and protected unique identity information, as shown in Figure 2.
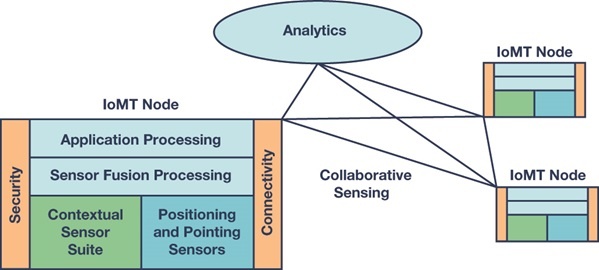
Figure 2. Interconnected security sensors that integrate context and location information.
Sensor is the core of automation Just like the human body, the Automated Moving IoT node relies on detecting multiple inputs to achieve the desired perceptual capabilities, acting independently and optimizing its results based on random, even out-of-order events, ultimately improving over time. As shown in Table 4, the transition from basic measurement to control to automation increases the complexity of the sensor fusion layer and the computational complexity of embedded devices. Because these nodes also achieve high interconnectivity and adaptive learning capabilities, they may move toward human-computer convergence.
Table 4. Based on high-quality sensors, increasing integration and intelligence drive automation and ergonomic integration

No infrastructure positioning GPS is ubiquitous unless satellite signals are blocked or interrupted. Wireless ranging techniques can be very accurate under the available conditions. If there is no interference, there is always a magnetic field reading. Inertia has a unique self-sufficiency. Obviously, inertial MEMS sensors have their own deficiencies (drift), but these shortcomings are within the controllable range. The new industrial inertial measurement unit (IMU) with small economical package has unprecedented stability.
Inertial MEMS devices use standard semiconductor processes, complex packaging, and integrated modes, typically detecting, measuring, and interpreting their motion in linear acceleration (g) or angular velocity (°/sec, or rate), as shown in Figure 3. Since all other applications have so-called multiple degrees of freedom in addition to the most gentle applications (actually, they can move on any axis and all devices are unconstrained in their motion), this must be captured Acceleration and angular velocity values ​​for each of the x, y, and z axes; or, in some cases, the roll, pitch, and yaw axes. Taken together, these are sometimes referred to as six-degree-of-freedom inertial measurement units.
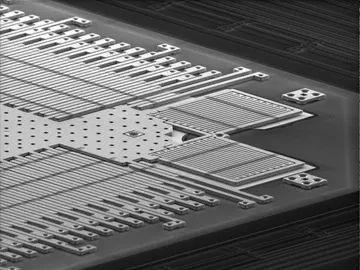
Figure 3. Microelectromechanical structure used to determine precision motion.
Although economic considerations will naturally encourage MEMS designers to extract these multiple detection types (acceleration, angular velocity) on each axis (x, y, z) with a minimum of silicon area, a more balanced performance design perspective is still required. To meet more challenging industrial inspection needs. In fact, some MEMS structures are trying to measure all six modes with a single MEMS module. Before examining the effectiveness of this approach for high-performance inspection, we must know that MEMS devices need to capture some motion, which is very important, but equally important, the same device must be able to abandon other forms of motion that can become errors. (or not affected by it). For example, although the gyroscope measures the angular rate, it should also be able to ignore the acceleration or gravitational effects on angular rate measurements. For a simple MEMS device, if you try to measure everything in a small structure, it is naturally (by design) very susceptible to these other sources of interference and cannot distinguish useful motion from unwanted motion. Ultimately, these sources of error can become noise and errors in navigation or applications.
The promise of the Moving Internet of Things to deliver resource efficiency, increased security or critical precision when needed, requires greater precision than simple sensors that are ubiquitous in today's mobile devices. The performance-focused design pattern becomes a model that is designed independently for each detection mode and each detection axis, but with the goal of moving toward convergence and integration. Finally, it must be known that designing for performance does not necessarily mean that it cannot be designed for economic considerations.
Function or performance Some applications can be extremely valuable by adding features (device gesture/direction mode switching) that can be obtained relatively easily with simple MEMS devices. Industrial or professional devices may be more likely to measure the difference between accuracy and sub-degree in different orientations, or to resolve positions with an accuracy greater than one order of magnitude, while also operating in high vibration environments. The difference in performance between the low-end sensor and the high-end sensor is not small. In fact, the difference between the two is very large, and it is necessary to carefully consider when selecting components.
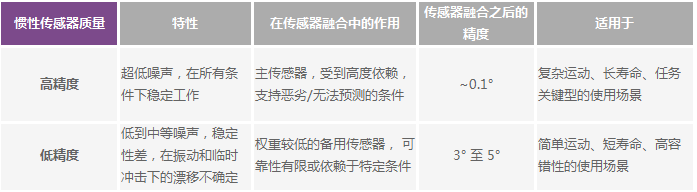
The final application will determine the level of accuracy required, and the quality of the selected sensor will determine whether it can be achieved. Table 5 selects two solutions for comparison, indicating that sensor selection is important for both the design process and equipment accuracy. If the sensor is only dependent on very limited conditions and the application is highly fault tolerant, then a low precision sensor can be used - in other words, if it is not a safe or life-critical application, relatively low accuracy is sufficient. While most consumer sensors have low noise and good performance under favorable conditions, they are not suitable for machines with dynamic motion (including vibration) because the lower performance inertial measurement unit cannot move dynamic motion with simple linear acceleration or The required tilt measurements are distinguished. When working in an industrial environment, to achieve an accuracy better than 1 degree, a specially designed sensor should be selected to suppress the error drift caused by vibration or temperature effects. This high-precision sensor is capable of supporting a wider range of expected application states and longer working hours.
Table 5. The accuracy and utility of the push is the quality of the sensor rather than the complexity of the sensor fusion.
Precision instrument designers are most interested in inertial measurement devices (IMUs) that output calibrated accelerations and rates rather than motion angles or distances, because such system-level information is highly dependent on the application. It is the focus of the system designer rather than the inertial sensor designer. The resulting problem, for example, is the resolution of the pointing accuracy from the inertial sensor specification sheet.
Table 6 shows the specifications of a mid-range industrial device, which is also compared with consumer-grade sensors commonly found in cell phones. Note that there are also higher-end industrial devices available that are an order of magnitude better than the devices shown in the table. Most low-end consumer devices do not provide parameter specifications such as linear acceleration effects, vibration correction, angular random walks, and these specifications are probably the largest sources of error in industrial applications.
Table 6. Industrial MEMS devices provide a comprehensive measure of all known potential sources of error, typically achieving an order of magnitude or higher accuracy for consumer devices.
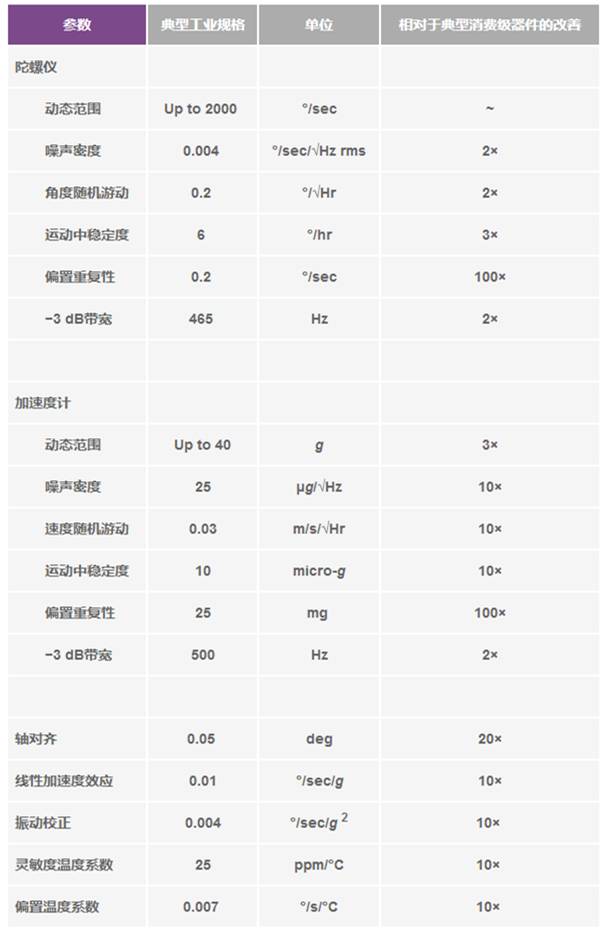
This industrial sensor sample is designed for scenarios where relatively fast or extreme motion (2000°/s, 40 g) is expected, and wide bandwidth sensor output is also critical to best discerning the signal. Offset drift (in-motion stability) during operation should be minimized to reduce the reliance on more complementary sensors (to correct performance). In some cases, the application cannot provide the time required for back-end system filter correction, in which case boot drift (reproducibility) must be minimized. A low noise accelerometer is used with the gyroscope to help distinguish and correct any drift with respect to acceleration.
The gyro sensor design can be used to directly eliminate the effects of any acceleration g events (vibration, shock, acceleration, gravity) on the device offset, which can greatly improve the linear acceleration; calibration, temperature drift and alignment are corrected. Without alignment correction, typical multi-axis MEMS devices may have large alignment errors even when integrated into a monolithic structure, making them a major contributor to error calculation.
In recent years, the role of noise in distinguishing sensor levels has been reduced. In applications beyond simple determination or relative stationary motion determination, parameters such as linear acceleration effects and alignment errors become sources of noise, and it is costly to improve them by chip design methods or device-specific calibration.
Can sensor fusion remediate poor quality sensors? The answer is simple, no. Sensor fusion is a filtering and algorithmic process that combines or manages sensor combinations relative to the environment, motion dynamics, and application state. Sensor fusion provides deterministic corrections (such as temperature compensation) and manages the switching process from one sensor to another based on system state knowledge, but does not compensate for the inherent defects of the sensor.
In the sensor fusion design, the most critical task is to first deepen the application state knowledge to provide support and power for the rest of the design process. When selecting the appropriate sensor for a given application, a detailed analysis should be performed to understand the weight (correlation) of the different phases of the overall task. In the pedestrian navigation location estimation example, the solution mainly depends on the available devices (such as embedded sensors in the smartphone), rather than through performance design. As a result, GPS and other available sensors, such as embedded inertial and magnetic sensors, are heavily relied upon to play a small role in determining useful location information. It works well outdoors, but in challenging urban environments or indoors, GPS is inaccurate, the quality of other available sensors is poor, and there is a large gap, in other words, the quality of location information is uncertain. Although advanced filters and algorithms are often used to fuse the data of these sensors without the need for any additional sensors or better quality sensors, the software has little effect in bridging the uncertainty gap, ultimately reducing confidence in reporting locations. A conceptual illustration is shown in FIG.
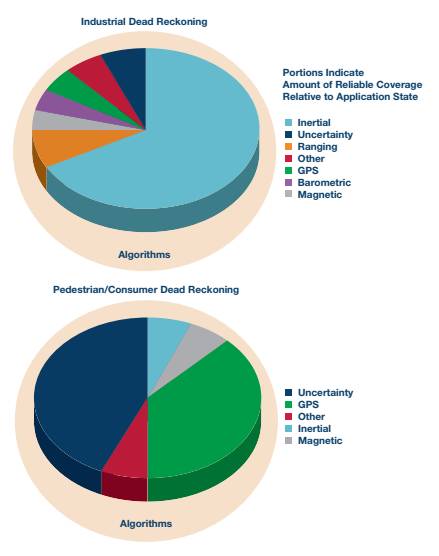
Figure 4. Application-level accuracy depends on sensor quality rather than sensor fusion complexity.
In sharp contrast, the industrial navigation positioning calculation scheme is designed for system performance definition, and components should be selected according to specific accuracy requirements. Higher quality inertial sensors allow them to play a major role, making appropriate use of other sensors to narrow the uncertainty gap. The algorithm conceptually focuses more on optimal weights, switching and sensor complementarity, as well as knowledge of the environment and real-time motion dynamics, rather than estimating/estimating the position between reliable sensor readings.
Accuracy can be improved by selecting a higher quality sensor in either case. Although sensor filtering and algorithms are an important part of the solution, they do not eliminate the gap in low quality sensor coverage.
The performance of new industrial sensors is close to the level of sensors previously used for missile guidance. These new industrial sensors are uniquely designed for reliable and precision automotive applications and are economically engineered, offering unique advantages in performance-to-cost ratio and performance-to-size ratio, as shown in Figure 5.

Figure 5. Industrial-grade 6-DOF IMU ADIS1647x ​​and ADIS1646x provide high levels of precision in complex and dynamic environments.
Precision motion detection is no longer exclusive to niche applications, and other applications have no choice but to invest in expensive tracking solutions. With the launch of the mini IMU industrial-grade precision sensor, IoT designers can now multiply the value of their products by integrating premium motion detection and embedded context detection.
10 Mm Nano Tip,Smart Board Touch Screen Pen,Electronic White Board Pen,Infrared Touch Screen Pen
Shenzhen Ruidian Technology CO., Ltd , https://www.szwisonen.com